

KM25620820 (การขยายความละเอียดเชิงพื้นที่ LIDAR)
เรียบเรียงโดย อาจารย์ภรวัฎ ธนกิติวิรุฬ (20/8/2562)
ความเป็นมา
ในการสำรวจสภาพของพื้นผิวถนนที่ถูกทำลาย เช่นการสำรวจหาพื้นผิวที่มีการยุบตัว หรือรอยแตกบนถนน ภาพถ่ายพื้นถนนทั่วไป จะบอกได้เพียงความกว้างหรือตำแหน่งของผิวถนนที่ถูกทำลาย หรือบางที่อาจระบุไม่ได้ เนื่องจากบริเวณพื้นผิวที่ถูกทำลายมีสีที่คล้ายคลึงกับบริเวณผิวถนนที่มีสภาพดี การใช้ LiDAR จะทำให้มองเห็นความแตกต่างของพื้นผิวถนนได้ แต่เมื่อนำข้อมูล LiDAR ที่ได้จากการสำรวจพื้นผิวของถนนมาประกอบสร้างเป็นรูปภาพพื้นผิวถนน ในลักษณะของ แบบจำลองภูมิประเทศเชิงเลขหรือ Digital Elevation Model(DEM) เพื่อทำการวิเคราะห์ พบว่าภาพที่ได้จะมีความละเอียดเชิงพื้นที่ต่ำมาก ทำให้การวิเคราะห์ข้อมูลลักษณะของพื้นผิวถนนเป็นไปได้ยาก
ดังนั้นเพื่อให้สามารถวิเคราะห์สภาพพื้นผิวของถนนจากข้อมูล LiDAR ได้ง่ายมากขึ้น จึงจำเป็นจะต้องเพิ่มความละเอียดเชิงพื้นที่ของข้อมูล LiDAR ให้มากขึ้น วิธีการหนึ่งที่จะสามารถเพิ่มความละเอียดเชิงพื้นที่คือ การใช้การประมาณค่าในช่วง โดยอาศัยภาพถ่ายพื้นผิวของถนน ณ ตำแหน่งที่เก็บข้อมูลมาช่วย พิกเซลของภาพถ่ายพื้นผิวถนนจะใช้เป็นข้อมูลในการอ้างอิงตำแหน่งและสีของแต่ละพิกเซลจะใช้ในการเปรียบเทียบความแตกต่างของสีพื้นผิวถนน หลังจากการใช้การประมาณค่าในช่วงแล้ว ผลลัพธ์ที่ได้จะเป็น แบบจำลองภูมิประเทศเชิงเลขที่มีความละเอียดเชิงพื้นที่สูงขึ้น ซึ่งมีกรรมวิธีในการทำดังต่อไปนี้
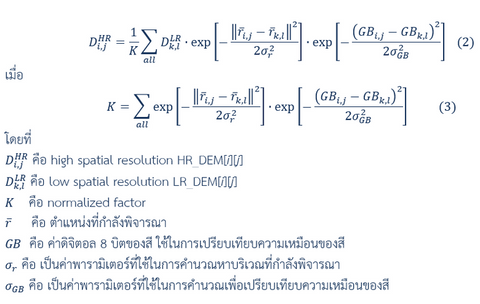
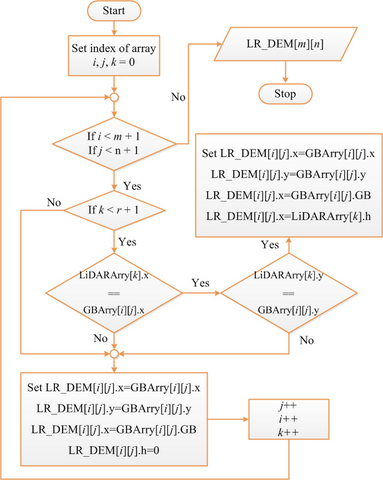
ขั้นที่ 4. สร้างแบบจำลองภูมิประเทศเชิงเลขที่มีความละเอียดเชิงพื้นที่สูง ด้วยการแทรกข้อมูล LIDAR_Array[r] ลงไปใน GB_Array[m][n] ตามโฟลชารจ์ที่ 1 เมื่อแทรกแล้วจะเก็บข้อมูลไว้ในอาเรย์ 2 มิติ ชนิดของข้อมูลเป็น LiDAR_DS ชื่อว่า LRDEM[m][n] หลังจากนั้นใช้ สมการที่ (2) และ (3)ในการคำนวณเพื่อหาความสูงต่ำของพื้นผิว ข้อมูลแต่ละตำแหน่งที่คำนวณได้จะถูกเก็บลงใน อาเรย์ 2 มิติ ขนาด mxn มีชนิดของข้อมูลเป็น HR_DEM[m][n] ซึ่งตอนนี้หากเรานำ HR_DEM[m][n] ไปสร้างแบบจำลองภูมิประเทศเชิงเลข จะได้แบบจำลองภูมิประเทศเชิงเลขที่มีความละเอียดเชิงพื้นที่สูง
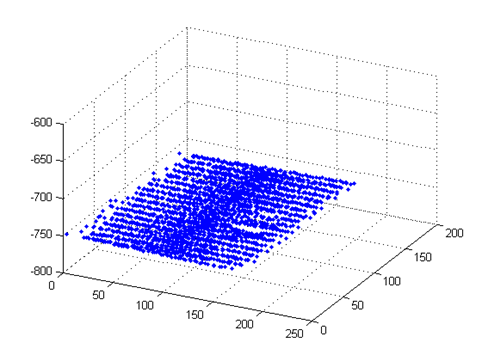
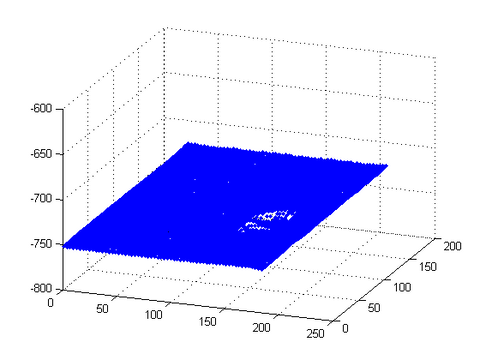
ภาพแบบจำลองภูมิประเทศเชิงเลขที่มีความละเอียดเชิงพื้นที่สูงที่ได้จากวิธีประมาณค่าในช่วง สามารถแสดงได้ดังรูปที่ 4 ซึ่งแสดงให้เห็นว่า วิธีการประมาณค่าในช่วงสามารถเพิ่มความละเอียดเชิงพื้นที่ของแบบจำลองภูมิปะเทศได้
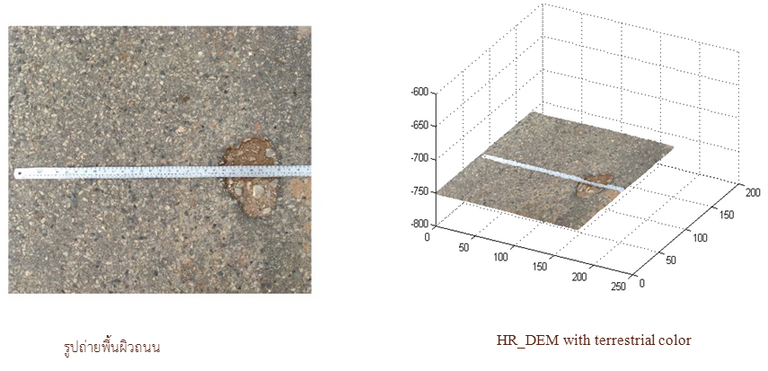
จากรูปที่ 5 แสดงให้เห็นว่า เมื่อใช้การประมาณค่าในช่วง โดยอาศัยการเปรียบเทียบความเหมือนของสีของพื้นผิวถนนจะทำให้ได้ภาพแบบจำลองภูมิประเทศความละเอียดเชิงพื้นที่สูงออกมา หากเสริมผลลัพธ์ที่ได้กับ terrestrial color จะทำให้เราเห็นถึง สภาพความเสียหายของพื้นผิวถนนได้ง่ายมากขึ้น และเมื่อนำไปเปรียบเทียบกับภาพพื้นผิวถนน ณ ตำแหน่งที่เก็บข้อมูล ทำให้เราเห็นถึงความเสียหายของพื้นผิว ไม่ว่าจะเป็น ขอบ ความตื้นและลึกของหลุมได้ชัดเจนมากขึ้น
โดยสรุปแล้ว แบบจำลองภูมิประเทศเชิงเลขที่มีความละเอียดเชิงพื้นที่สูงนี้ สามารถนำไปใช้ในการวิเคราะห์สภาพพื้นผิวของถนนที่ถูกทำลายได้ทั้งแบบมุมมองสองมิติและสามมิติ นอกจากนี้จากผลการทดลองยังบอกเป็นนัยแก่เราว่า สภาพพื้นผิวถนนที่ถูกทำลายในลักษณะอื่น เช่นการยุบตัว หรือร่องถนนสามารถใช้กระบวนการข้างต้นหาได้